






Aplicações Típicas

Benefícios da Aplicação
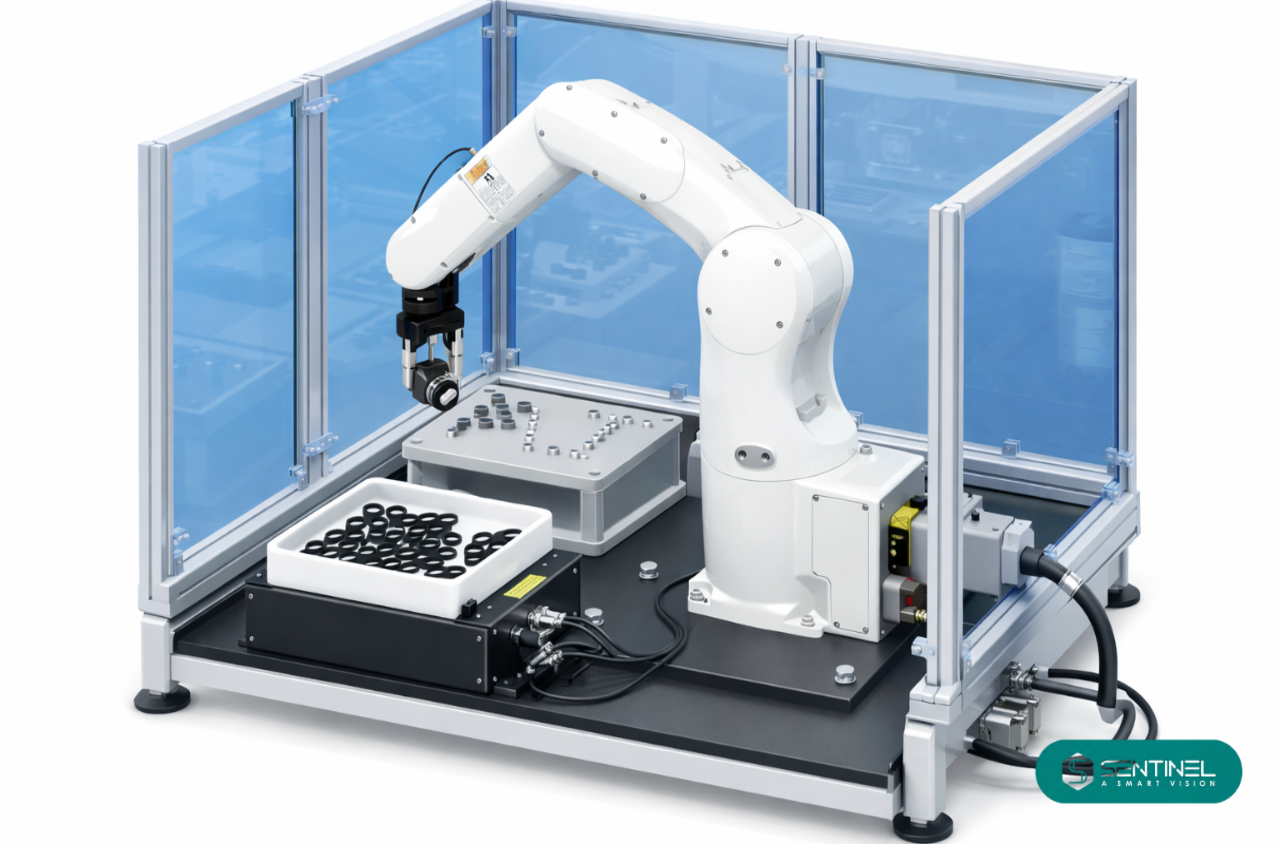
A utilização de bin picking com visão 3D permite resolver desafios críticos de alimentação automática de peças.



Recolha Inteligente de Peças Desordenadas
O bin picking é uma solução de visão artificial que permite identificar e recolher peças colocadas de forma aleatória em contentores, sem necessidade de ordenação manual ou sistemas mecânicos dedicados.
As soluções de Bin Picking da SENTINEL Vision utilizam visão 3D e algoritmos avançados para fornecer ao robô informação precisa sobre a posição e orientação das peças, mesmo quando se encontram sobrepostas ou parcialmente ocultas.
Localização 3D
Em aplicações de bin picking, a partir da informação 3D, são calculados os eixos, superfícies e pontos de referência necessários para uma pega correta.
D
Esta análise permite selecionar a melhor estratégia de agarre, tendo em conta a geometria da peça, o tipo de garra e a presença de peças adjacentes, reduzindo falhas de pega e riscos de colisão durante o movimento do robô.
f
Calibração Robô – Câmara














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}