






Typical Applications

Application Benefits
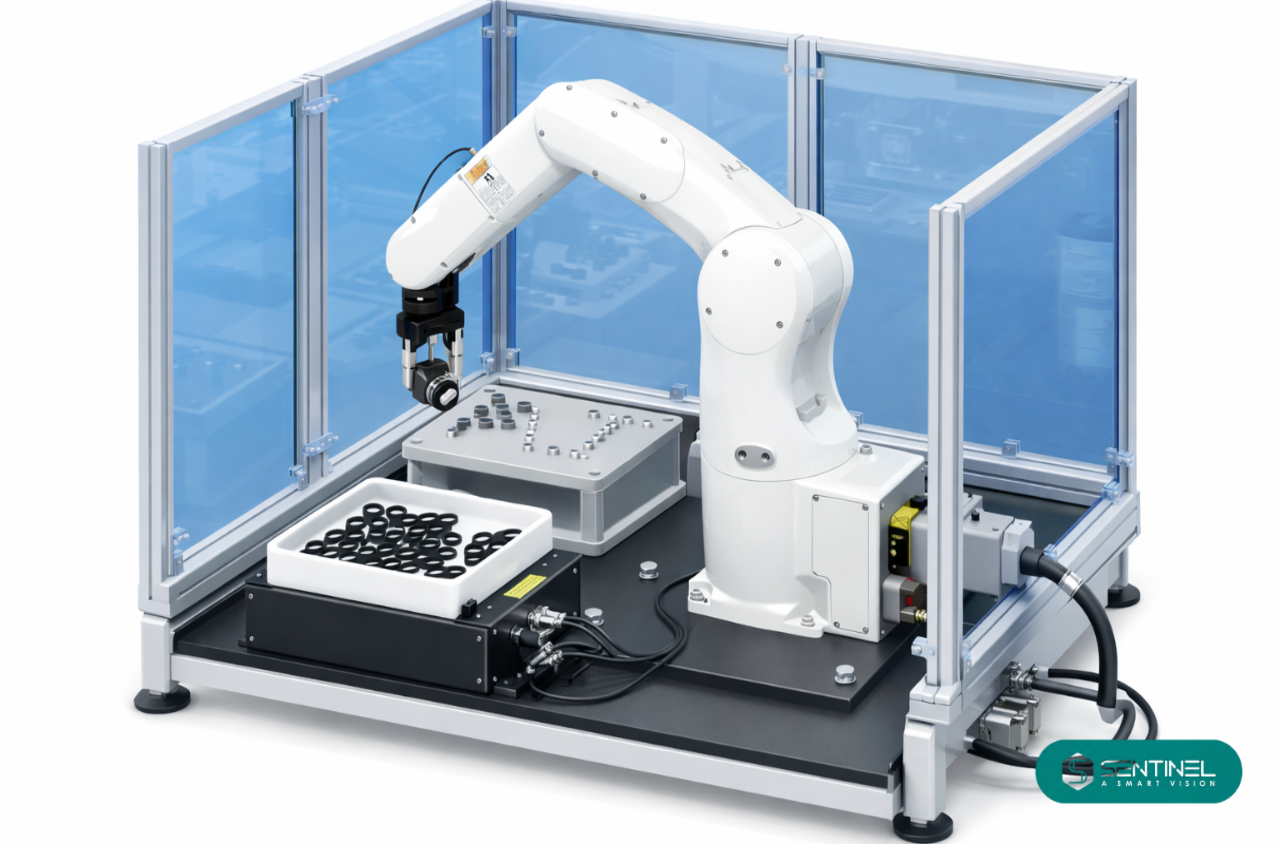
The use of 3D vision bin picking solves critical challenges in automated part feeding.



Intelligent Picking of Randomly Arranged Parts
O bin picking é uma solução de visão artificial que permite identificar e recolher peças colocadas de forma aleatória em contentores, sem necessidade de ordenação manual ou sistemas mecânicos dedicados.
SENTINEL Vision’s Bin Picking solutions use 3D vision and advanced algorithms to provide the robot with precise information about part position and orientation, even when parts are overlapping or partially occluded.
3D Localization
In bin picking applications, critical gripping references such as axes, surfaces and reference points are calculated from 3D data.
D
This analysis enables the selection of the optimal gripping strategy, considering part geometry, gripper type and the presence of neighbouring parts, reducing gripping failures and collision risks during robot motion.
f
Robot – Camera Calibration








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}